 Europe
Europe  Türkiye
Türkiye 


Notre équipe s’efforce d’apprendre et de progresser en explorant des technologies variées. Pour ce projet, notre objectif était de concevoir un train d’atterrissage rétractable sur mesure pour une compétition nationale d’UAV. Cette conception visait à réduire la traînée aérodynamique et à améliorer l’efficacité de l’appareil. Les trains d’atterrissage rétractables sont généralement utilisés par des avions volant sur de longues distances à grande vitesse. Pour relever un défi technique, nous avons décidé d’adapter cette solution à notre véhicule..
Conception du train d’atterrissage rétractable
Le train d’atterrissage est composé d’un mécanisme intégrant plusieurs éléments :
- Un bras lié à un servo-moteur
- Une rainure en T pour le repli
- Une colonne principale
- Une colonne secondaire
- Un bras en forme de L pour fixer la roue
- Une combinaison vis-mère et moteur à courant continu pour l’ouverture et la fermeture
- Et un boîtier principal facilitant l’assemblage
Nous avons utilisé un ressort de raideur moyenne pour éviter les impacts entre les colonnes et protéger le mécanisme. Les systèmes pneumatiques ont été exclus en raison des problèmes potentiels d’étanchéité et de maintenance.
Au sommet, le mécanisme comporte une articulation permettant un mouvement complet du gouvernail et une vis-mère pour l’ouverture et la fermeture. De plus, le mécanisme se replie horizontalement lors de la rétraction afin d’optimiser l’espace occupé par la roue.
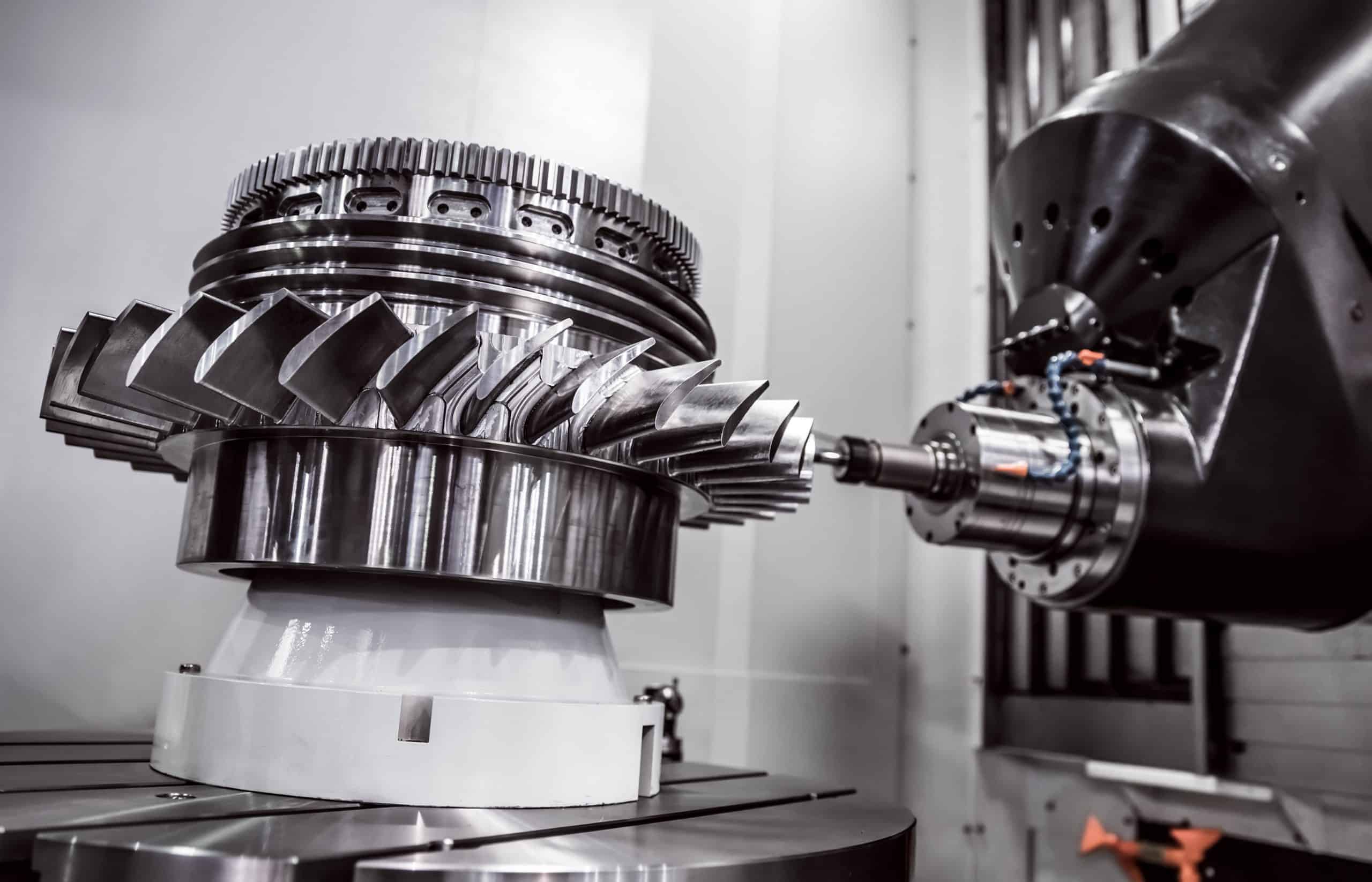
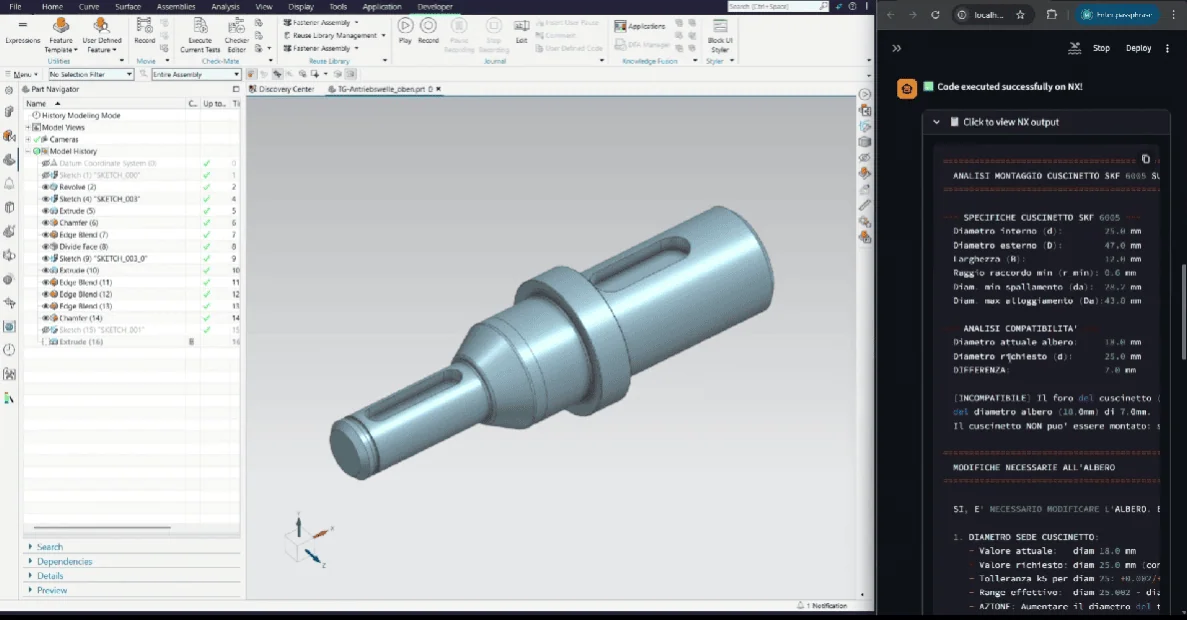
Les principaux défis consistaient à analyser précisément le mécanisme de mouvement et à fabriquer les composants avec un alliage léger mais durable. Pendant la phase de conception, nous avons utilisé le moteur de devis instantané de Xometry pour estimer les coûts. Une fois les designs finalisés, Xometry a accepté de sponsoriser la fabrication de certaines pièces.
Nous avions besoin de composants complexes et robustes, nécessitant l’usinage CNC, le taraudage et des tolérances serrées. Xometry nous a aidés à produire la colonne principale, la colonne secondaire et la pièce de liaison de la roue en alliage Al7075.


Une réussite grâce à la persévérance et à l’innovation
Après une année de planification minutieuse, de tests, d’essais en vol, de crashs et d’innombrables ajustements, nous avons participé à la compétition Fighter UAV de TEKNOFEST 2024 avec notre appareil à voilure fixe, Dişsiz. Nous avons obtenu la troisième place dans la catégorie des mentions honorables et remporté le prix du « Meilleur Design » !
Malgré une collision en plein vol avec l’UAV d’une autre équipe, causant des dommages à notre appareil, nous n’avons pas baissé les bras. En seulement 30 heures, sans dormir, nous avons réparé notre avion sur place et repris la compétition avec l’esprit Fighter UAV.
Par ailleurs, nous avons réalisé un exploit remarquable en terminant deuxièmes lors de la compétition RoboNation SUAS’24 aux États-Unis avec notre appareil à voilure tournante, Şimşek, fruit de plusieurs années d’expérience. Représenter notre pays et notre université sur la scène internationale fut un immense honneur. Malgré une collision due à des erreurs organisationnelles, nous avons maintenu notre rang, terminant deuxièmes sur 69 équipes.

Préparation aux compétitions futures
Cette année, nous prévoyons de participer à nouveau à la compétition Fighter UAV de TEKNOFEST ainsi qu’à la compétition SUAS (Student Unmanned Aerial Systems) aux États-Unis. Notre objectif est de développer deux nouveaux appareils : un à voilure tournante et un à voilure fixe. Dans ces deux compétitions, nous visons la première place !
Apprenez-en davantage sur ITUNOM et suivez-les sur Linkedin.
Et vous, avez-vous déjà travaillé sur un projet UAV ambitieux ? Partagez vos expériences et les solutions innovantes que vous avez utilisées pour surmonter les obstacles !
Partagez votre expérience en ingéniérie ou de conception de produits

Partagez votre expérience !
Partagez votre expérience en ingéniérie ou de conception de produits et recevez une compensation de 300€ à faire valoir sur vos pièces ! Présentez vos solutions innovantes et vos meilleures pratiques à notre communauté.
Partagez votre expérience en ingéniérie ou de conception de produits
- Nous recherchons des témoignages à propos de solutions d’ingénierie mécanique innovantes, de conception et de développement de composants mécaniques ou de création de produits de pointe.
- Notre équipe vous aidera à préparer votre témoignage et à le traduire en plusieurs langues.
- De plus, vous recevrez en contrepartie 300 EUR à faire valoir sur le site de Xometry, après la publication de votre témoignage*.
Erreur : Formulaire de contact non trouvé !




Comment(0)